One of
the primary purposes of unmanned systems is to keep humans out of danger by
performing dangerous, dirty, and dull tasks. Fires represent one of the
greatest dangers to sailors, working onboard U. S. Navy ships. The Office of
Naval Research (ONR) has developed a robotic firefighter to work alongside
humans to fight fires. The Shipboard Autonomous Firefighting Robot (SAFFiR),
which is pronounced as “safer”, performs firefighting tasks aboard the Navy ships,
keeping the sailors safe and providing enhanced situational awareness for human
firefighters. This unmanned ground vehicle (UGV) is a humanoid robot, which measures
5 feet 10 inches and weighs 143 pounds (Gaudin, 2016).
The 2016 article by Sharon Gaudin talks about
this amazing robot, which will potentially be a great benefit for the United
States Navy. It is not only designed for the firefighting applications, but
also is capable of performing basic maintenance tasks, such as checking for
corrosion and leaks. By performing everyday maintenance and inspections, the
SAFFiR could free up sailors for more advanced
technical jobs onboard of the ship. Figure 1 depicts the prototype of the
SAFFiR.

Figure
1. The SAFFiR humanoid
firefighter trials. Adopted from “Making sailors ’SAFFiR’ - Navy unveils
firefighting robot prototype at Naval Tech EXPO,” by T. White, 2015. Copyright
2015 by U.S. Navy.
This UGV is designed to be
capable to perform autonomous operations, however, initial robot design keeps the
operator in the loop, allowing the human controller to monitor and override any
action of the UGV. The main goal for the SAFFiR is to allow this robot to
seamlessly work alongside its human counterparts on the Navy ships, responding
to verbal commands and gestures, such as pointing and
hand signals (Eshel, 2015).
To enable natural collaboration with a
human “fire boss”, the robot will be equipped with multimodal interfaces that
will enable the robot to track and focus its attention on the human team
leader. Researchers are planning to further simplify the robot interaction by
using natural language commands
(White, 2015).
It is designed to endure high temperature
environments, recognize fire hazards, and extinguish fires using a broad range
of fire suppression tools. Its upper body will be capable of manipulating fire
suppressors and throwing propelled extinguishing agent technology grenades. The
SAFFiR is battery powered, which gives the robot about 30 minutes of
firefighting mission time, after which time the battery needs to be recharged (McKinney, 2012). As we can
see, the power system design still needs to be improved to allow for longer
mission endurance, when necessary. Figure 2 represent some of the features of
the SAFFiR.
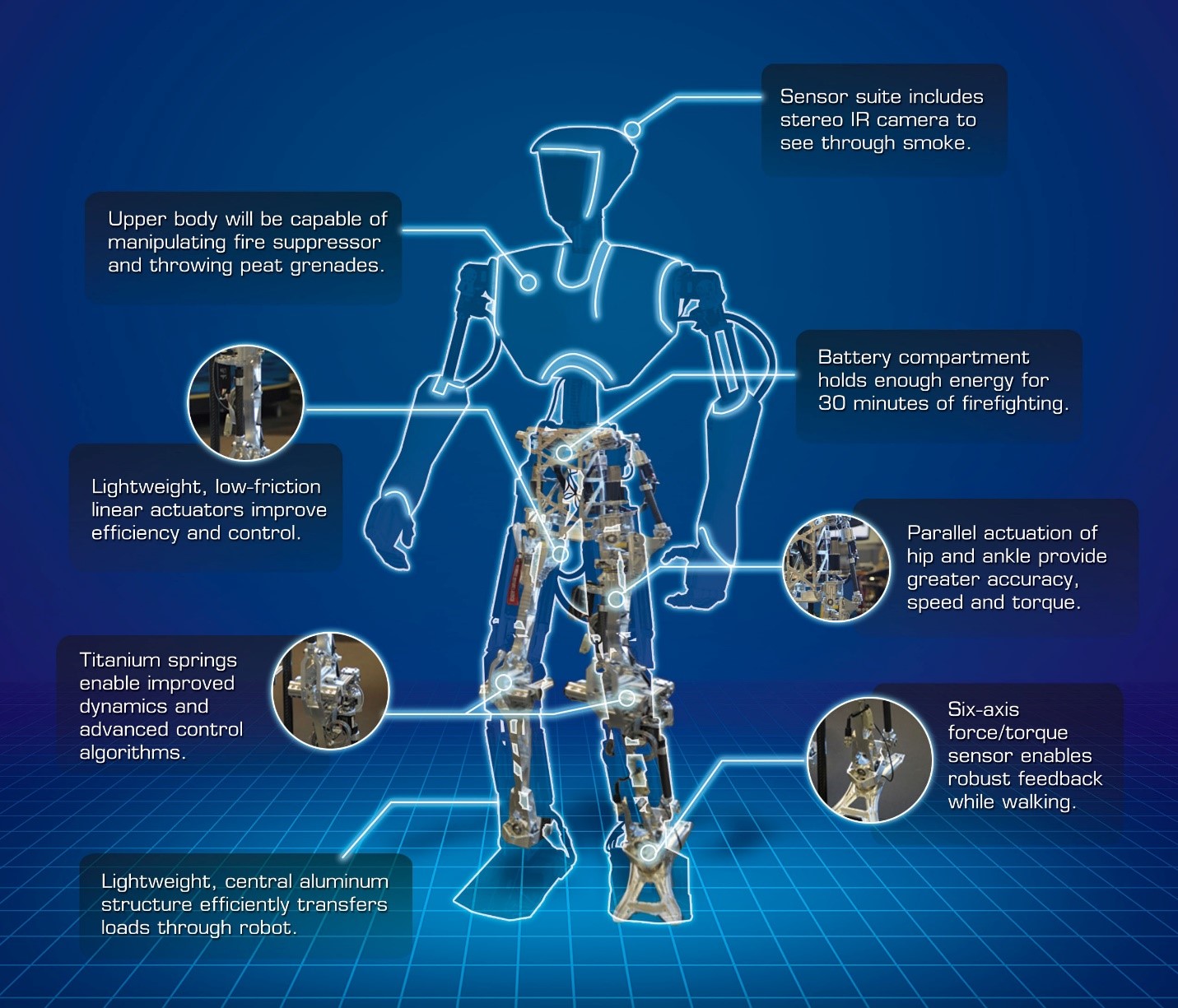
Figure 2. The Naval Research
Laboratory's Shipboard Autonomous Firefighting Robot (SAFFiR) is a
humanoid-type robot being designed for shipboard firefighting. Adapted from “NRL designs robot for shipboard
firefighting,” by D. McKinney, 2012. Copyright 2012 by U.S. Naval Research Laboratory.
This bipedal robot can walk,
balance, and navigate even on the moving ships, it can cross over obstacles, manipulate
fire hoses, and install fire shielding equipment. It features a lightweight
central aluminum construction, which allows for efficient transfers of loads
throughout the UGV’s body. It’s six- axes force/torque sensor allows for strong
feedback while walking. The advanced
joint movements are enabled by titanium springs installed in the robot’s “legs”
(McKinney, 2012).
The SAFFiR is designed to
“see” through dense smoke with a help of advanced sensor suit, including infrared
stereo vision, gas sensor, and a rotating laser for light detection and ranging
(LIDAR) (Gaudin, 2016). So far, the SAFFiR is in its testing
stage. The first trials will take place onboard a
decommissioned U.S. Navy vessel, the USS Shadwell, docked in Mobile Bay,
Alabama.
The researchers are working to constantly
improve and enhance the SAFFiR. The latest development for the humanoid
includes a motion-planning algorithms to allow the robot to skillfully perform
a variety of autonomous tasks. The U.S. Navy awarded a $600,000 grant to the Worcester
Polytechnic Institute for development of the advanced motion algorithms for
this UGV to work in complicated scenarios. These algorithms will allow the robot to be able to move
quickly in confined spaces when working onboard a ship or submarine. It must
also be able to stay balanced while the ship is moving in rough seas. Researchers
are planning to improve the SAFFiR with enhanced computing power, and increase
its ability to solve complicated tasks, and better communication capabilities,
and longer endurance.
The main goal for the
development of the firefighting robot is to prevent tragedies like the one
onboard the USS Miami in May of 2012. The nuclear submarine was damaged by an
onboard fire, started by a shipyard worker, while in a dry dock at the
Portsmouth Naval Shipyard in Kittery, Maine. Seven people were injured during
fire. Because of the degree of the damage to the vessel, the Navy inactivated
the ship. (Gaudin, 2016).
Although,
humanoid-type robots may seem less stable than their wheeled counterparts, the
SAFFiR is showing promising results for life-saving applications, while
skillfully balancing on a moving ships with the help of its advanced motion
algorithms and with the constant advancements in robotic technology, humanoid-type
UGVs will eventually play an important part in our everyday lives.
References:
No comments:
Post a Comment